

На правах рукописи
ЛЫСЫЧ Михаил Николаевич
Обоснование параметров рабочего органа
и режимов работы лесного культиватора
05.21.01 – Технология и машины лесозаготовок и
лесного хозяйства
А В Т О Р Е Ф Е Р А Т
диссертации на соискание ученой степени
кандидата технических наук
Воронеж - 2010
Работа выполнена в Государственном образовательном учреждении высшего профессионального образования «Воронежская государственная лесотехническая академия» (ВГЛТА)
Научный руководитель: доктор технических наук, профессор
Бартенев Иван Михайлович
Официальные оппоненты: доктор технических наук, профессор
Пошарников Феликс Владимирович
кандидат технических наук
Казаков Игорь Владимирович
Ведущая организация: Государственное образовательное учреждение
высшего профессионального образования
«Московский государственный университет
леса» (141001, г. Мытищи-1, Московской обл.
ул. Институтская, д. 1, МГУЛ)
Защита диссертации состоится «25» июня 2010 г. в 1300 часов на заседании диссертационного совета Д 212.034.02 при Воронежской государственной лесотехнической академии (394087, г. Воронеж, ул. Тимирязева, 8, зал заседания – аудитория 240)
С диссертацией можно ознакомиться в научной библиотеке Воронежской государственной лесотехнической академии (ВГЛТА).
Автореферат размещен на официальном сайте академии: E-mail: [email protected]
Автореферат разослан «14» мая 2010 г.
Ученый секретарь
диссертационного совета Скрыпников А.В.
Общая характеристика работы
Актуальность темы.
Уход за культурами, создаваемыми на вырубках, является одной из важнейших операций технологического процесса лесовосстановления, определяющей сохранность культур и их развитие. Эта операция выполняется в течение ряда первых лет несколько раз за сезон, и на ее долю приходится не менее 40 % всех материальных затрат на создание культур.
В настоящее время культуры на вырубках создают либо по расчищенным от порубочных остатков и пней полосам шириной 2,5 м, с расстоянием между рядами культур 5 м, либо с понижением пней до уровня поверхности почвы на всей культивируемой площади. Но в любом случае почвы остаются насыщенными корнями деревьев и кустарников, являющимися препятствиями для рабочих органов культиваторов.
В силу этих причин для ухода за культурами на вырубках применяют культиваторы с дисковыми рабочими органами (КЛБ-1,7, КДС-1,8 и др.). Диски хорошо преодолевают препятствия в виде корней и пней, практически, не забиваются почвой и растительной массой, но недостаточно полно уничтожают сорную растительность и неустойчивы по глубине обработки почвы. В результате требуется не менее чем двукратный проход культиватора по одному следу при каждом уходе. Это значительно увеличивает материальные затраты и в два и более раза срок пребывания энергетического средства (трактора) на одной операции в ущерб другим работам в хозяйстве.
Лемешные рабочие органы в виде стрельчатых лап широко применяются в паровых, пропашных, садовых и лесных культиваторах для открытых площадей, свободных от твердых включений в почве. Они устойчивы по глубине обработки и эффективно уничтожают сорняки, но им присущи недостатки: забивание растительными остатками, низкая проходимость и надежность при преодолении препятствий, необходимость применения предохранительных устройств, как это выполнено, например, на культиваторе для каменистых почв КРТ-3. Препятствия в виде корней и пней, практически, исключают применение стрельчатых лап для ухода за культурами на вырубках без изменения прочностных и геометрических параметров и использования дополнительных устройств, обеспечивающих их проходимость.
Таким образом, существует проблема, имеющая в технологическом и техническом плане большое значение, что делает тему диссертационной работы актуальной. Решение данной проблемы возможно при сочетании в одном комбинированном рабочем органе положительных свойств сферических дисков и стрельчатых лап и применении специального устройства, обеспечивающего проходимость стрельчатых лап через пониженные пни и древесные корни.
Работа выполнена в соответствии с госбюджетной темой ГОУ ВПО ВГЛТА «Совершенствование технологий, машин и оборудования лесного комплекса» (№ гос. регистрации 01.2.00609242).
Цель и задачи исследования – повышение качества и экономической эффективности уходов за культурами на вырубках с пониженными пнями путем обоснования конструкции и параметров комбинированного рабочего органа культиватора. В соответствии с поставленной целью намечено решить следующие задачи:
1. Получить математические модели, описывающие динамику движения рабочих органов орудия при преодолении препятствий и в почвенной среде.
2. Обосновать оптимальные параметры комбинированного рабочего органа и предохранительного механизма для работы на вырубках с пониженными пнями, обеспечивающие высокое качество уничтожения нежелательной растительности и приемлемые прочностные характеристики с минимальной энергоемкостью.
3. Изучить процесс взаимодействия комбинированного рабочего органа с почвой и препятствиями в виде пней и корней при уходе в междурядьях лесных культур, изготовить экспериментальный образец и провести лабораторные испытания.
4. Обосновать общую схему экспериментального культиватора, оснащенного разработанными рабочими органами, и определить ожидаемый экономический эффект от его применения на вырубках с пониженными пнями.
Объектом исследования являются новые конструкции рабочих органов культиваторов, препятствия и почва.
Предмет исследований – динамика движения и агротехника рабочих органов в процессе обработки почвы при уходе за культурами на вырубках.
Методы исследований. Теоретические исследования выполнены на основе твердотельного и математического моделирования с использованием методов теоретической механики и дифференциального исчисления. Экспериментальные исследования и проверка основных теоретических положений проводились на натурных образцах рабочих органов и серийных секциях культиватора КРТ-3 в лабораторных и полевых условиях.
Научная новизна.
1. Предложены математические модели, описывающие динамику движения рабочих органов, как при преодолении пня, так и при движении в почвенной среде.
2. Установлены тип и оптимальные параметры комбинированного рабочего органа и предохранительного механизма, обеспечивающие высокие прочностные характеристики и улучшение агротехнических показателей.
3. Изучен процесс взаимодействия комбинированного рабочего органа (патент на изобретение № 2319329) с почвой и препятствиями в виде пней и корней при уходе в междурядьях лесных культур.
4. Даны рекомендации по технологии проведения уходов культиватором, оснащенным разработанными рабочими органами, и экономическая оценка эффективности его применения.
Значимость для науки заключается в развитии теории силового взаимодействия упруго закрепленных рабочих органов с препятствиями и почвенной средой, что дает возможность на стадии проектирования определить конструктивные и технологические параметры рабочих органов, позволяющие увеличить степень уничтожения нежелательной растительности и улучшить прочностные характеристики. Разработана конструкция почвообрабатывающего орудия с новыми рабочими органами.
Практическая ценность. Разработана перспективная конструкция комбинированного рабочего органа, обеспечивающая преодоление препятствий и позволяющая увеличить степень уничтожения нежелательной растительности в условиях вырубок с пониженными пнями без значительных дополнительных материальных вложений.
Основные положения, выносимые на защиту:
1. Математические модели, описывающие динамику движения рабочих органов орудия при преодолении препятствий и в почвенной среде, позволяющие обосновать параметры рабочих органов и предохранительных механизмов.
2. Оптимальные параметры комбинированного рабочего органа и предохранительного механизма, полученные на основе математического моделирования и подтвержденные экспериментально.
3. Процесс взаимодействия комбинированного рабочего органа (патент на изобретение № 2319329) с почвой и препятствиями в виде пней и корней при уходе в междурядьях лесных культур.
4. Рекомендации по технологии проведения уходов культиватором, оснащенным разработанными рабочими органами, и экономическая оценка эффективности его применения.
Достоверность полученных результатов. Выводы диссертационной работы базируются на результатах фактического материала, полученного при проведении лабораторных и полевых испытаний. В ходе проведения лабораторных исследований учитывались свойства почвы, характер расположения препятствий и сила переднатяжения пружин предохранительного механизма. Полученные данные обрабатывались методом математической статистики с использованием программ Microsoft Excel 2003 и Mathсad 13 для персонального компьютера.
Личное участие автора заключается в определении целей и задач работы, в выполнении теоретических и экспериментальных исследований и анализа их результатов.
Апробация работы. Основные положения диссертационной работы докладывались и обсуждались на научных конференциях профессорско-преподавательского состава Воронежской государственной лесотехнической академии (2006-2010 гг.), а также заседаниях кафедры механизации лесного хозяйства и проектирования машин Воронежской государственной лесотехнической академии.
Публикации. Основные научные разработки по теме диссертации опубликованы в 9 работах, включая 1 статью в изданиях, определенных ВАК Минобрнауки РФ, 4 публикации без соавторов и 1 патент на изобретение.
Реализация работы. Разработанная машина для агротехнического ухода за лесными культурами, а также результаты научных исследований были внедрены в ФГУП «Центральное опытно-конструкторское бюро лесохозяйственного машиностроения», учебно-опытном лесхозе ВГЛТА и в учебном процессе ГОУ ВПО «Воронежская государственная лесотехническая академия» при подготовке инженеров лесотехнического профиля.
Структура и объем диссертации. Диссертационная работа состоит из введения, пяти разделов, основных выводов и рекомендаций, списка использованных источников и приложений.
Общий объем работы составляет 192 страницы, из них 165 страниц основного текста и 27 страниц приложений. Работа включает 51 иллюстрацию, 8 таблиц и 109 наименований использованных источников.
СОДЕРЖАНИЕ РАБОТЫ
Введение. Обоснована актуальность темы исследования, сформулированы цель работы и научные положения, выносимые на защиту, научная новизна выполненных исследований, их практическая значимость, результаты внедрения.
В первом разделе проведен анализ технологий лесовосстановления, способов и технических средств для удаления нежелательной растительности на вырубках. Над этими вопросами работали такие ученые, как А.И. Баранов, И.М. Зима, Т.Т. Малюгин, П.С. Нартов, В.Н. Винокуров, Г.А. Ларюхин, И.М. Бартенев, Н.П. Калиниченко, Ю.М. Жданов, Ф.В. Пошарников, В.И. Посметьев, А.М. Цыпук, В.И. Казаков, С.И. Сушков, М.В. Драпалюк и др.
Исследованиями резания лесных почв занимались ученые: Ю.И. Полупарнев, А.Ф. Пронин, А.Д. Далин, Г.Б. Климов, Е.А. Витвицкий, Ю.И. Колесников, А.Ф. Совков, В.Д. Крыльцов, М.В Драпалюк, и др.
Дан обзор исследований по обоснованию конструкций пассивных рабочих органов и предохранительных механизмов, а также исследований динамики почвообрабатывающих орудий и рабочих органов. Этими вопросами занимались П.С. Нартов, И.М. Бартенев, В.И. Посметьев, В.Р. Карамышев, Л.Т. Свиридов, П.И. Жидких, Г.Б. Климов, Н.Н. Агапонов, В.И. Маслай, Ю. К. Киртбая. Сформулированы задачи исследований.
Анализ существующих технологий лесовосстановления показал, что наиболее экологически безопасны и экономичны технологии, обеспечивающие минимизацию воздействия на почву. В первую очередь это достигается путем замены корчевки пней их понижением до уровня почвы. Отказ от последующих агротехнических уходов в условиях вырубок невозможен, так как это ведет к заглушению и гибели культур.
Для проведения уходов наиболее эффективно и экологически безопасно применение механических средств борьбы c нежелательной растительностью, уничтожающих не только надземные части растений, но их корневые системы одновременно с рыхлением поверхностного слоя почвы. Дисковые культиваторы и бороны наиболее распространены для проведения уходов в условиях вырубок. Однако, вследствие их низкой эффективности, требуются многократные проходы по одному следу.
Лемешные рабочие органы достаточно хорошо уничтожают нежелательную растительность, но их применение в условиях вырубок с пониженными пнями, вследствие низкой эксплуатационной надежности, ограничено. Решить данную проблему можно, если лемешные рабочие органы оснастить специальными устройствами, обеспечивающими преодоление препятствий и предохраняющими их от деформации и поломок. К таким устройствам можно отнести ножи криволинейной формы, подобной режущей кромке диска, и предохранители пружинного типа.
В настоящее время методика проектирования и совершенствования рабочих органов, рассматриваемых в совокупности с упругим многозвенным предохранительным механизмом, на основе полипараметрической модели силового взаимодействия, практически, не проработана. В такой постановке задача представляет научный и практический интерес.
Анализ литературных и патентных материалов показывает, что совершенствование конструкции машин для ухода за лесными культурами идет как по пути оптимизации технологических и конструктивных параметров рабочих органов и предохранительных механизмов, так и создания новых с учетом требований эколого- и ресурсосбережения, позволяющих более эффективно их использовать.
Во втором разделе приводятся обоснование и оптимизация параметров комбинированного рабочего органа и типа предохранительного механизма для агротехнических уходов за лесными культурами на вырубках с пониженными пнями, их кинематический и динамический анализ; разработана полипараметрическая математическая модель, позволяющая описать динамику движения рабочего органа в процессе обработки почвы и при преодолении препятствий. На конструкцию орудия, оснащенного комбинированными и дисковыми рабочими органами, получен патент на изобретение № 2319329.
Комбинированный рабочий орган представляет собой совокупность серийной стрельчатой лапы культиватора КРТ-3 и ножа криволинейной формы, радиус кривизны которого переменный, имеющий большее значение в его передней части для обеспечения свободного скольжения ножа по поверхности препятствия, причем криволинейный нож установлен ниже опорной поверхности лемешного рабочего органа (рисунок 1, а). Он состоит из серийной стойки 1, ножа 5 и стрельчатой лапы 6. Нож выполнен как единая сварная деталь, состоящая из верхнего 2 и нижнего 3 кронштейнов крепления к стойке и лобовика 4. Такое конструктивное решение позволят надежно закреплять нож при помощи болтовых соединений, без какого либо изменения конструкции стойки, а паз, прорезанный в носке стрельчатой лапы, значительно повышает жесткость и уменьшает габариты рабочего органа.


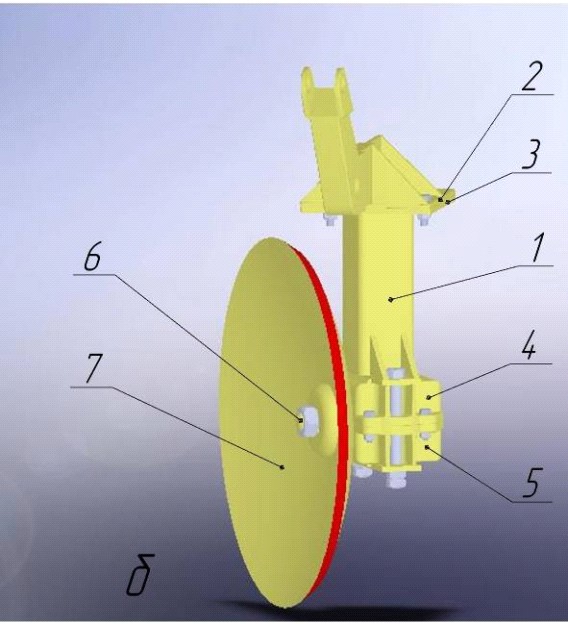
Для проведения сравнительных испытаний был создан дисковый рабочий орган с индивидуальной стойкой (рисунок 1, б). Он состоит из стойки 1, верхней неподвижной 2 и нижней 3 поворотных плит, имеющих ряд отверстий для изменения угла атаки (![]() ). К стойке болтовым соединением крепятся корпус подшипника скольжения, состоящий из верхней 4 и нижней 5 крышек, в котором устанавливается вал 6 с жестко закрепленным на нем сферическим диском 7. Используется стандартный цельнокрайний диск диаметром 510 мм.
). К стойке болтовым соединением крепятся корпус подшипника скольжения, состоящий из верхней 4 и нижней 5 крышек, в котором устанавливается вал 6 с жестко закрепленным на нем сферическим диском 7. Используется стандартный цельнокрайний диск диаметром 510 мм.
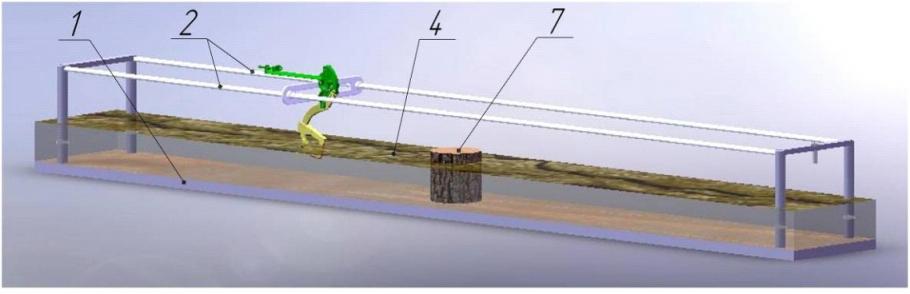
Для обоснования и оптимизации параметров рабочих органов и изучения кинематики и динамики процесса преодоления препятствий был создан ряд твердотельных моделей рабочих органов в САПР SolidWorks. Их испытание проводилось на виртуальном стенде средствами приложения COSMOSMotion (рисунок 2). Стенд состоит из основания 1, двух цилиндрических направляющих 2, каретки 3 и условно обозначенной земли 4. На каретке, имеющей возможность прямолинейного движения без трения, закреплялась модель секции 5 культиватора КРТ-3 с серийным, дисковым и экспериментальным 6 рабочими органами. В основании жестко устанавливался пень 7.
В приложении COSMOSWorks методом конечных элементов были проведены прочностные исследования моделей комбинированного рабочего органа с различными геометрическими параметрами. Установлены наиболее опасные варианты нагружения: боковая нагрузка, прикладываемая к ножу в области лобовика, и нормальная нагрузка, прикладываемая к крайней точке режущей кромки крыла стрельчатой лапы, по которым проводились дальнейшие прочностные испытания.
По результатам динамических и прочностных исследований комбинированного рабочего органа была проведена оптимизация его геометрических параметров.
Для оптимизации угла вхождения уст и толщины вн ножа определяли экстремумы четырех частных критериев оптимизации: критическая сила Fmax н (уст, вн), по достижении которой происходит разрушение конструкции; тяговое сопротивление Rн (уст, вн) рабочего органа; абсолютный показатель динамики при въезде на препятствие дв (уст, вн) и при сходе с препятствия дс, (уст, вн) (рисунок 3). Необходимо решить следующие задачи оптимизации:
Fmax н (уст, вн)mах;
Rн (уст, вн)min;
дв (уст, вн) min;


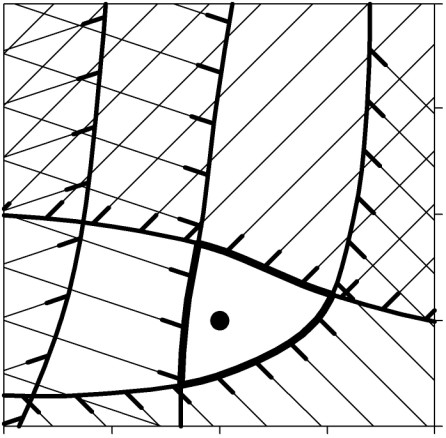



дс, (уст, вн) min.
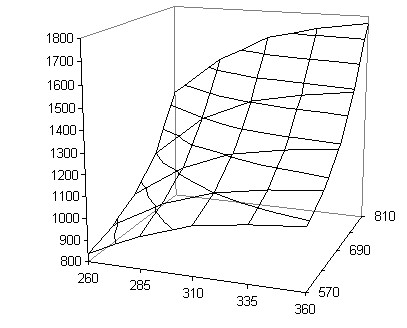
Для оптимизации ширины захвата вл и площади критического сечения Sл стрельчатой лапы находились экстремумы двух частных критериев оптимизации: критическая сила Fmax л (Sл, вл ), по достижении которой происходит разрушение стрельчатой лапы, и тяговое сопротивление Rл(Sл, вл ) (рисунок 4). Откуда
Fmax л (Sл, вл )mах;
Rл(Sл, вл )min.


Полученные оптимальные параметры комбинированного рабочего органа обеспечивают необходимый запас прочности, приемлемые динамические характеристики и минимальное тяговое сопротивление. Для ножа: угол установки от 105 до 120 град при его толщине от 5 до 7 мм. Для стрельчатой лапы: ширина захвата от 260 мм до 270 мм при площади поперечного сечения критической области в основании крыла от 660 до 710 мм2.
Создана полипараметрическая математическая модель, позволяющая описать динамику движения рабочего органа, как при преодолении препятствий, так и в процессе силового взаимодействия с почвой (расчетная схема на рисунке 5):


где ![]() – главный вектор сил сопротивления, Н;
– главный вектор сил сопротивления, Н; ![]() – текущая глубина обработки, м; 3 – текущий угол поворота рабочего органа относительно точки прицепа (обобщенная координата), рад;
– текущая глубина обработки, м; 3 – текущий угол поворота рабочего органа относительно точки прицепа (обобщенная координата), рад;  – начальный угол поворота, рад;
– начальный угол поворота, рад;
![]() – угол между главным вектором сил сопротивления
– угол между главным вектором сил сопротивления ![]() и продольной осью рабочего органа, рад;
и продольной осью рабочего органа, рад; 
 – угол между продольной осью рабочего органа и вектором
– угол между продольной осью рабочего органа и вектором ![]() абсолютной скорости т. Di, рад;
абсолютной скорости т. Di, рад;
 – главный момент сил сопротивления, Нм;
– главный момент сил сопротивления, Нм;
![]() – упругий момент со стороны предохранительного механизма, Нм;
– упругий момент со стороны предохранительного механизма, Нм;
 – ударная нагрузка на рабочий орган при встрече с рамой, Нм;
– ударная нагрузка на рабочий орган при встрече с рамой, Нм;
![]() – периодические возмущения, Нм;
– периодические возмущения, Нм;
 – единичный импульс, Нм;
– единичный импульс, Нм; ![]() – максимальное значение силы удара, Нм;
– максимальное значение силы удара, Нм; ![]() – коэффициент усиления; kудар – коэффициент плавности удара, (Нм)-1;
– коэффициент усиления; kудар – коэффициент плавности удара, (Нм)-1; ![]() – амплитуда возмущающих воздействий, Нм; kпл – коэффициент плавности импульса, (Нм)-1, t – время, с; tсдвиг – сдвиг по времени пика возмущающего воздействия от начала движения, с; в – частота возмущающих воздействий, с-1; н – начальная фаза, рад.
– амплитуда возмущающих воздействий, Нм; kпл – коэффициент плавности импульса, (Нм)-1, t – время, с; tсдвиг – сдвиг по времени пика возмущающего воздействия от начала движения, с; в – частота возмущающих воздействий, с-1; н – начальная фаза, рад.
Эта модель позволяет установить не только динамические характеристики, но и получить пути заглубления и оценить устойчивость рабочих органов по глубине обработки с учетом силового взаимодействия с почвой.
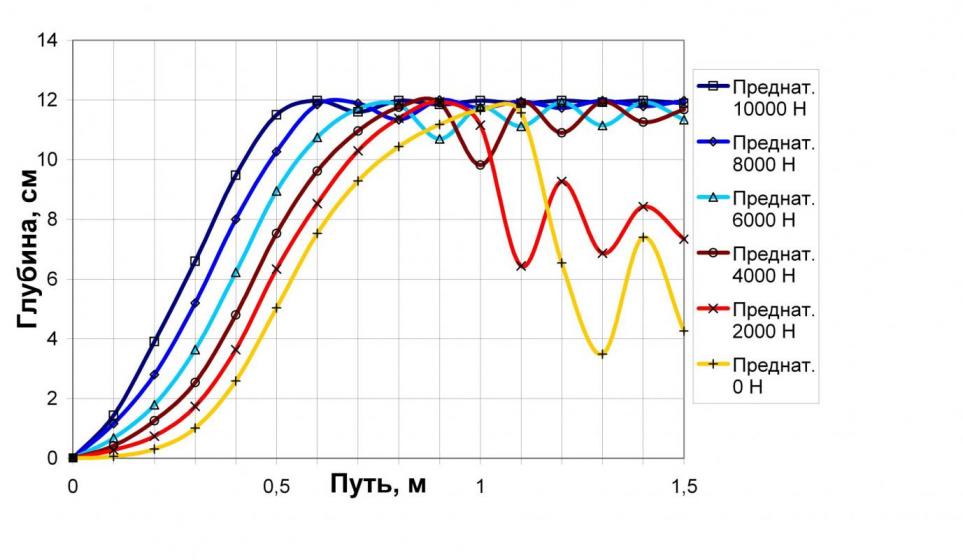
Система дифференциальных уравнений (1) решена в среде MatCAD. Результаты решения представлены в виде графиков зависимостей траектории движения комбинированного рабочего органа в почвенной среде от преднатяжения пружин (рисунок 6).
Было установлено, что для обеспечения заглубления на номинальную глубину обработки (а =12 см) при сходе с пня высотой 0 см достаточно общего преднатяжения пружин в 2500 Н. Однако при дальнейшем движении наблюдается заметная неравномерность по глубине обработки при наложении единичных импульсов, имитирующих перерезание мелких корней (до 1 см диаметром). Для обеспечения стабильной глубины обработки в условиях вырубки необходимо обеспечивать преднатяжение пружин в 5000 Н.
В третьем разделе изложена программа экспериментальных исследований, применяемое оборудование и методика проведения исследований.
Разработанная лабораторная тензометрическая установка для изучения силовых параметров рабочих органов при взаимодействии с почвой включает следующие основные элементы: грунтовый канал 1, тяговую тележку 2 с 3-точечным навесным устройством, тензометрическое навесное оборудование 3 и устройства для преобразования электрического сигнала и регистрации измеряемых величин (рисунок 7, а).
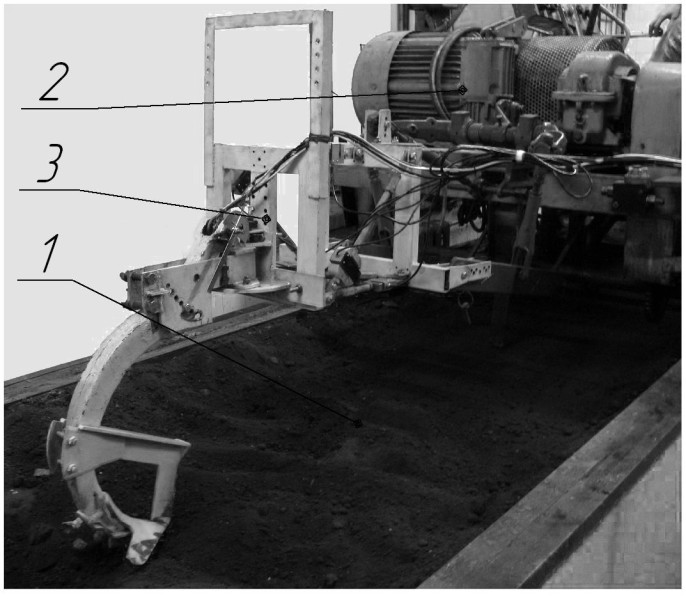

Для изучения динамики процесса преодоления препятствий была использована тензометрическая установка 1, закрепленная на тяговой тележке 2. Тяговое сопротивление фиксировалось при помощи тензозвена 3, а углы поворота предохранительного механизма датчиками угла поворота 4 (рисунок 7, б). Электронно-измерительная аппаратура использовалась такая же, как в выше приведенной установке.
В четвертом разделе приведены результаты исследований динамики преодоления пня рабочими органами и их силовые параметры при взаимодействии с почвой.
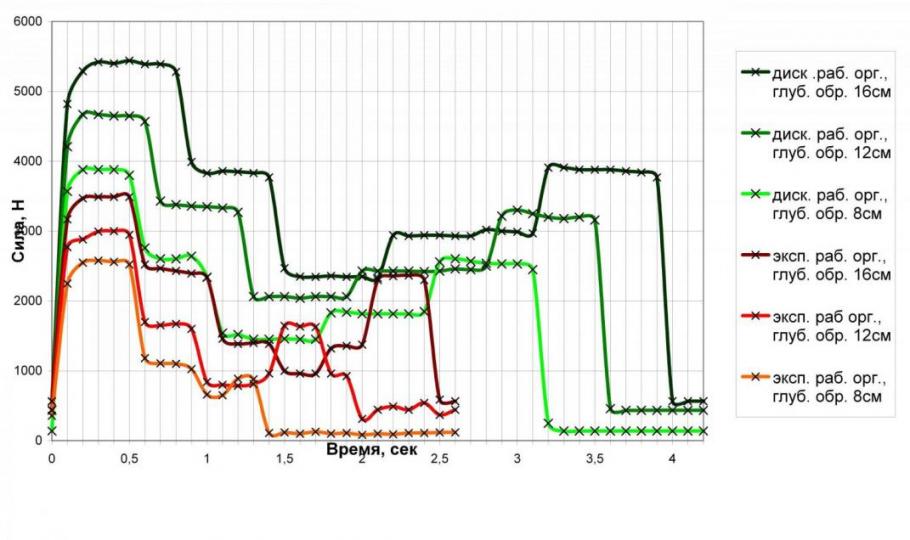
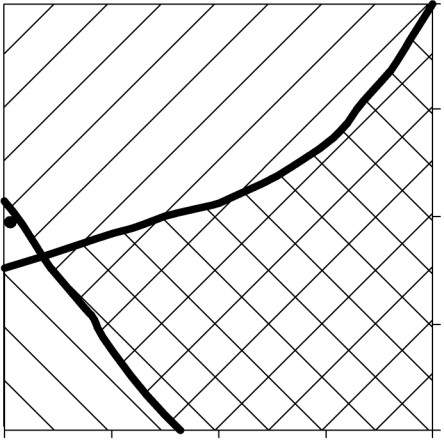
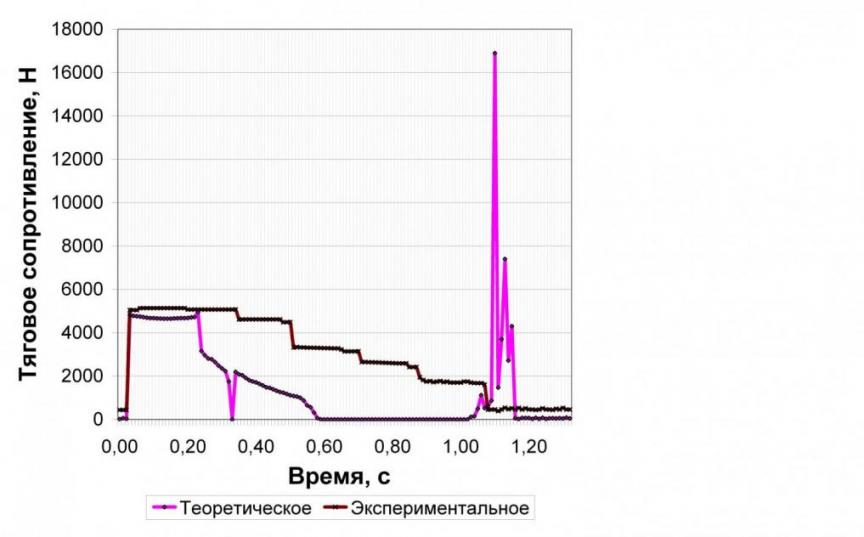
На рисунке 8 представлена зависимость тягового сопротивления рабочих органов от времени.
Анализ результатов показал, что максимум тягового сопротивления во всех опытах достигается уже через 0,3 секунды после столкновения с пнем. Для экспериментального рабочего органа при номинальной глубине обработки и высоте пня в 10 см он составляет 5133 Н, а для дискового 4410 Н. Эта тенденция прослеживалась во всех опытах и в среднем разница составляет 12 %. При движении по срезу пня тяговое сопротивление экспериментального рабочего органа равномерно убывает. Тяговое сопротивление дискового рабочего органа также сначала убывает, однако, потом начинает снова расти, достигая максимума в момент схода с пня.
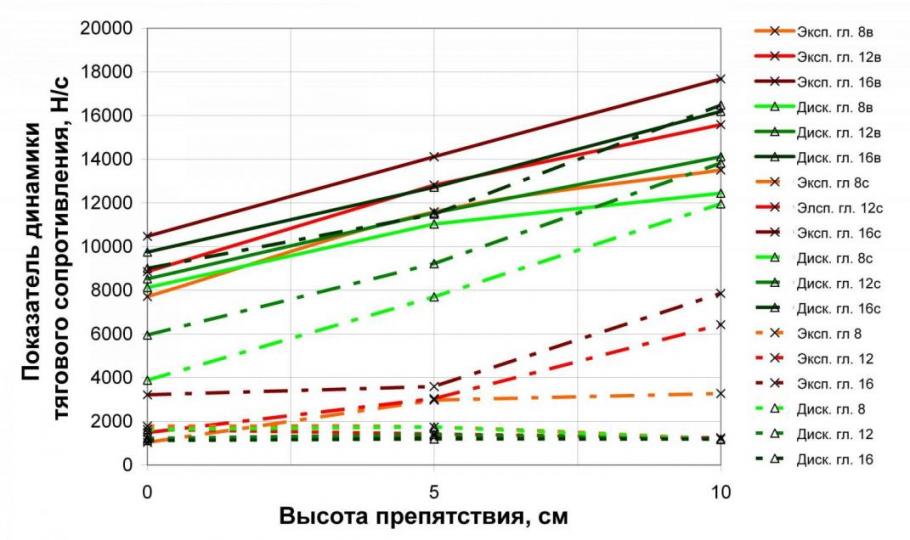
Максимальное значение абсолютного показателя динамики ![]() (рисунок 9) при въезде на пень экспериментального рабочего органа в целом выше, чем у дискового. Это объясняется разницей в геометрии, ведущей к тому, что при переезде пня одной и той же высоты экспериментальный рабочий орган отклоняется на больший угол. С ростом высоты пня величина
(рисунок 9) при въезде на пень экспериментального рабочего органа в целом выше, чем у дискового. Это объясняется разницей в геометрии, ведущей к тому, что при переезде пня одной и той же высоты экспериментальный рабочий орган отклоняется на больший угол. С ростом высоты пня величина ![]() растет практически линейно для обоих рабочих органов и достигает при высоте пня в 10 см и глубине обработки в 16 см 17680 Н – для экспериментального и 16560 Н – для дискового рабочего органа. Максимальное же значение абсолютного показателя динамики
растет практически линейно для обоих рабочих органов и достигает при высоте пня в 10 см и глубине обработки в 16 см 17680 Н – для экспериментального и 16560 Н – для дискового рабочего органа. Максимальное же значение абсолютного показателя динамики ![]() при сходе с пня, напротив, значительно больше у дискового рабочего органа и достигает при высоте пня в 10 см и глубине обработки в 16 см 16620 Н, а для экспериментального рабочего органа лишь 7860 Н. С ростом высоты пня
при сходе с пня, напротив, значительно больше у дискового рабочего органа и достигает при высоте пня в 10 см и глубине обработки в 16 см 16620 Н, а для экспериментального рабочего органа лишь 7860 Н. С ростом высоты пня ![]() также растет по закону, близкому к линейному.
также растет по закону, близкому к линейному.
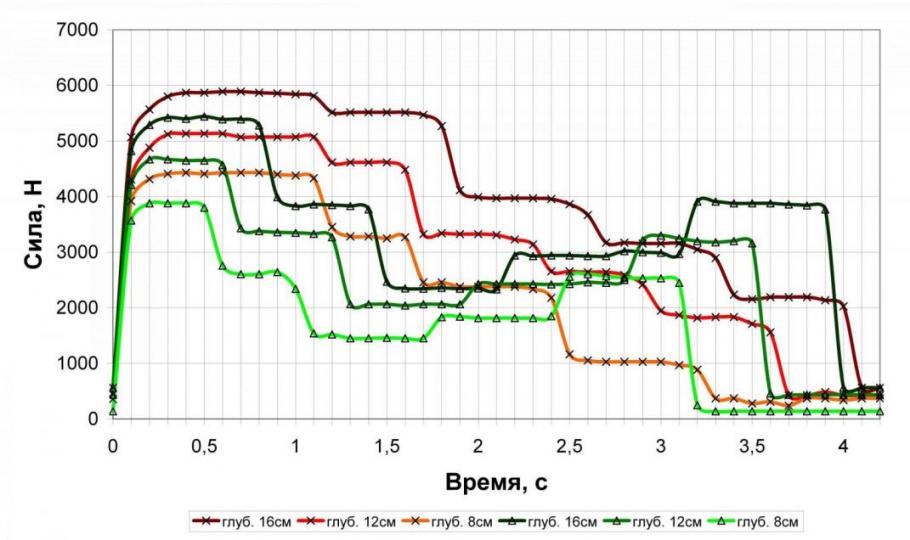
Проверка достоверности силовых параметров проводилась путем сравнения тягового сопротивления и силы на виртуальном двигателе (рисунок 10). Расхождения по максимальным значениям при въезде на пень составляют для экспериментального рабочего органа – 3,9 %, для дискового – 1,7 %. При дальнейшем движении по поверхности пня у экспериментального рабочего органа расхождения увеличиваются, хотя также наблюдается снижение тягового сопротивления. Однако у дискового рабочего органа тяговое сопротивление после некоторого снижения начинает возрастать, достигая максимума в момент схода с пня. Это объясняется уводом диска при качении по поверхности пня, что ведет к возникновению дополнительных нагрузок, растущих с увеличением диаметра пня.
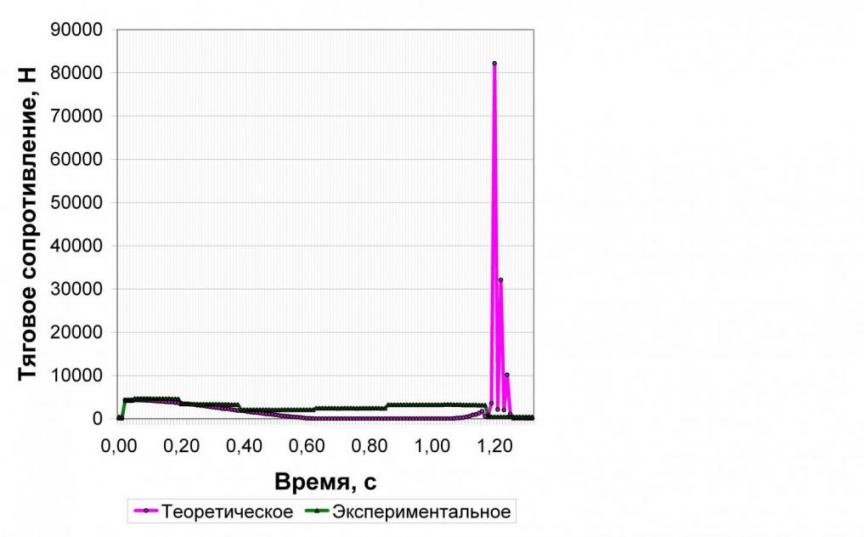
Расхождения между теоретическими и экспериментальными данными возникли из-за того, что в модели был использован твердый пень, исключающий врезание и заклинивание режущих кромок рабочих органов. Опираясь на приведенные данные, можно сделать вывод о том, что полученные теоретическим путем нагрузки, от удара рабочего органа об упоры, могут быть приняты с достаточной степенью точности. Это особенно важно потому, что из-за конструкции тензонавески и характеристик используемой регистрирующей аппаратуры невозможно фиксирование данного параметра.
С целью подтверждения адекватности математической модели была проведена её экспериментальная проверка. Для этого использована тензометрическая установка для изучения динамики переезда секции культиватора через препятствие.
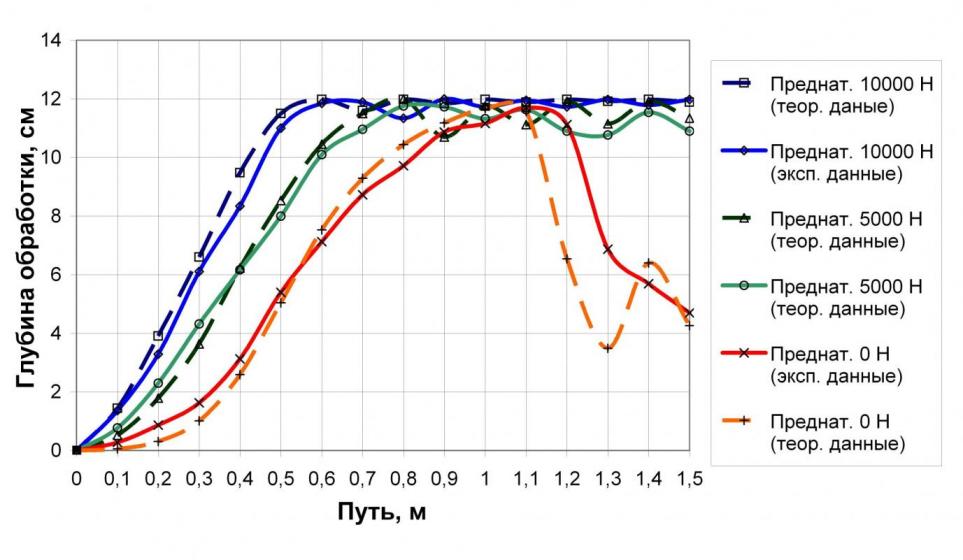
На рисунке 11 приведены пути заглубления экспериментального рабочего органа с различными значениями натяжения пружин при преодолении пня нулевой высоты. На графиках видно, что при нулевом преднатяжении пружин предохранительного механизма глубина обработки нестабильна, рабочий орган после удара об упоры предохранительного механизма «всплывает», при этом глубина обработки снижается до 4…6 см. При преднатяжении пружин в 5000 Н отклонения от номинальной глубины обработки в 12 см находятся в пределах 2 см. Таким образом, для стабильной работы экспериментального рабочего органа в условиях задернелых лесных почв общее преднатяжение пружин предохранительного механизма должно составлять не менее 5000 Н.
Сравнительный анализ теоретических и экспериментальных данных установил, что расхождения между ними составляют 4…7 %. Последнее подтверждает адекватность математической модели. Это открывает широкие возможности по изучению устойчивости движения различных рабочих органов при их работе в условиях нераскорчеванных вырубок, где на поверхности есть множество несмещаемых препятствий, таких как пни и крупные корневые лапы, а почвы насыщены корнями различных размеров.
В пятом разделе дается описание экспериментального образца культиватора для агротехнического ухода за лесными культурами и экономическая оценка эффективности его работы.
Устройство культиватора представлено на рисунке 12. Он состоит из рамы 1, комбинированных 2 и дисковых 3 рабочих органов с предохранительными устройствами 4, опорных колёс 5 с винтовыми механизмами 6 и устройства для автоматической сцепки 7. Рабочие органы установлены шарнирно при помощи четырехзвенных предохранительных механизмов на поперечных брусьях культиватора.
Испытания проводились на проведении уходов в междурядьях трехлетних культур сосны обыкновенной, созданных по дну борозд, подготовленных плугом ПКЛ-70 на вырубке с пониженными пнями. Скорость движения агрегата 1,0±0,5 м/с. Преднатяжение пружин составляло 5000 Н.

Полевые испытания культиватора КРТ-3, оснащенного комбинированными и дисковыми рабочими органами, показали, что предлагаемая схема агрегата реальна и работоспособна в условиях вырубки с пониженными пнями. За весь период испытаний не было случаев поломок. Было установлено отсутствие забиваемости рабочих органов и их устойчивость по глубине обработки в условиях задернелых почв. Среднеквадратичное отклонение глубины обработки и ширины защитной зоны от номинального значения в 1,8 раза, а число повреждаемых культур в 10 раз меньше, чем у культиватора КЛБ-1,7, работающего в аналогичных условиях. Наибольшая эффективность уничтожения нежелательной растительности достигается при установке дисковых рабочих органов с углом атаки в 30° и составляет 83,5 %.
Общие выводы и рекомендации
1. Теоретически установлено, что на вырубках с пониженными пнями могут эффективно применяться комбинированные рабочие органы, состоящие из серийной стрельчатой лапы и ножа криволинейной формы, установленного ниже опорной поверхности лемешного рабочего органа (защищен патентом №2319329), при этом угол установки ножа должен обеспечивать свободное преодоление препятствий.
2. Разработанный виртуальный стенд для испытания твердотельных моделей рабочих органов позволяет определять их кинематические и динамические характеристики при различных высотах препятствий и характере взаимодействия с минимальными затратами средств и времени. Это также дает возможность на стадии проектирования устанавливать характер распределения запаса прочности отдельных элементов рабочих органов. Полученные с его помощью оптимальные параметры комбинированного рабочего органа обеспечивают необходимый запас прочности, приемлемые динамические характеристики и минимальное тяговое сопротивление. Для черенкового ножа: угол установки от 105 до 120 град при его толщине от 5 до 7 мм. Для стрельчатой лапы: ширина захвата от 260 мм 270 мм при площади поперечного сечения критической области основания от 660 до 710 мм2.
3. Созданная полипараметрическая математическая модель силового взаимодействия достаточно полно и точно описывает динамику движения рабочего органа в процессе обработки почвы и при преодолении препятствий. С ее помощью получены динамические характеристики, оценена устойчивость по глубине обработки и пути заглубления рабочих органов с учетом силового взаимодействия с почвой, даны рекомендации по выбору величин преднатяжения предохранительного механизма (5000 Н для задернелых лесных почв), выбраны рациональные параметры предохранительного механизма, позволяющие незначительным варьированием всего трех параметров (l2=0,08, l3=0,260, l7=0,11) добиться улучшения его силовой характеристики.
4. Результаты лабораторных исследований по преодолению пней секцией культиватора подтвердили, что комбинированный и дисковый рабочие органы свободно преодолевают препятствия высотой до 16 см, а также полную неработоспособность серийного рабочего органа. В сравнении с секцией дискового культиватора экспериментальные рабочие органы испытывают нагрузки меньшие в 3,7…4 раза. Был установлен эффект демпфирования рабочих органов почвой при сходе с пня.
5. Полевые испытания экспериментального культиватора, оснащенного комбинированными рабочими органами, показали, что предлагаемая схема агрегата реальна и работоспособна в условиях вырубки с пониженными пнями. Установлено отсутствие забиваемости рабочих органов и их высокая устойчивость по глубине обработки в условиях задернелых почв. Среднеквадратичное отклонение глубины обработки и ширины защитной зоны от номинального значения в 1,8 раза, а число повреждаемых культур в 10 раз меньше, чем у культиватора КЛБ-1,7, работающего в аналогичных условиях.
6. С целью снижения затрат и ускорения процесса проведения уходов на вырубках с пониженными пнями целесообразно использовать культиватор КРТ-3, оснащенный новыми рабочими органами. Новое орудие позволяет повысить степень уничтожения сорной растительности на 27 % по сравнению с культиватором КЛБ-1,7. При этом уничтожение 83,5 % нежелательной растительности достигается после одного прохода.
7. Расчет технико-экономической эффективности показал, что внедрение новых рабочих органов при установке их на культиватор КРТ-3 в агрегате с трактором ЛХТ-55 позволит добиться годового экономического эффекта в размере 447862,5 рублей при сроке окупаемости 0,1 года.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
Печатные работы, входящие в перечень изданий, рекомендованных
ВАК к публикации при представлении кандидатской диссертации
1. Лысыч, М.Н. Использование систем твердотельного моделирования и инженерных расчетов при проектировании и испытании почвообрабатывающих орудий [Текст] / М.Н. Лысыч, // Вестн. КрасГАУ. 2010. № 1 С. 194-198.
Патенты
1. Пат. 2319329 РФ, МКИ A01B49/02, 76/00. Комбинированное почвообрабатывающее орудие [Текст] / И. М. Бартенев, М. Н. Лысыч, А. А. Кузнецов; заявитель и патентообладатель ВГЛТА. – № 2006127356/12; заявл. 27.07.2006; опубл. 20.03.2008, Бюл. № 12. – 3 с.
Статьи и материалы конференций
1. Бартенев, И. М. Математическая модель колебаний рабочего органа почвообрабатывающего орудия с пружинным предохранительным механизмом [Текст] / И. М. Бартенев, И. Е. Донцов, М. Н. Лысыч // Математическое моделирование, компьютерная оптимизация технологий, параметров оборудования и систем управления: межвуз. сб. науч. тр. под ред. В.С. Петровского; Фед. агенство по образованию, ГОУ ВПО «ВГЛТА». – Воронеж, 2008. – Вып. 13. С 70-74.
2. Бартенев, И. М Современные экологически сбалансированные, ресурсо- и энергосберегающие технологии лесовосстановления / И.М. Бартенев, И. Е. Донцов, М.Н. Лысыч; ГОУ ВПО «ВГЛТА». – Воронеж, 2008. – 21с. Библиогр.: 20 назв. Рус. Деп. в ВИНИТИ
3. Бартенев, И. М. Устойчивость движения почвообрабатывающих орудий и агрегатов / И.М. Бартенев, И. Е. Донцов, М.Н. Лысыч; ГОУ ВПО «ВГЛТА». – Воронеж, 2008. – 13с. Библиогр.: 16 назв. Рус. Деп. в ВИНИТИ
4. Лысыч, М. Н. Дифференциальные уравнения колебаний рабочего органа с пружинным предохранительным механизмом [Текст] / М. Н. Лысыч // Научный вестник ВГЛТА: сб. науч. тр. / ГОУ ВПО «ВГЛТА». – Воронеж, 2009. – Вып. 1. – С. 163-168.
5. Лысыч, М. Н. Некоторые особенности лесовосстановления в объединении Русский Лес [Текст] / М. Н. Лысыч, А. А. Кузнецов // Известия вузов. Северо-Кавказский регион. Технические науки. – 2007. – №4. – С. 115-116.
6. Лысыч, М. Н. Опыт производства посадочного материала в объединении «Русский лес» [Текст] / М. Н. Лысыч, А. А. Кузнецов // Известия вузов. Северо-Кавказский регион. Технические науки. – 2007. – №4. – С. 110-111.
7. Лысыч, М. Н. Применение метода конечных элементов для прочностных расчетов рабочих органов почвообрабатывающих орудий [Текст] / М. Н. Лысыч // Математическое моделирование, компьютерная оптимизация технологий, параметров оборудования и систем управления: межвуз. сб. науч. тр. под ред. В.С. Петровского; Фед. агенство по образованию, ГОУ ВПО «ВГЛТА». – Воронеж, 2009. – Вып. 14. С 86-90.
8. Лысыч, М. Н. Перспективы использования метода конечных элементов реализованного на основе современных средств САПР для прочностных испытаний проектируемых почвообрабатывающих орудий [Текст] / М. Н. Лысыч // Молодой ученый. – 2009. – №12. – С. 63-65.
Просим принять участие в работе диссертационного совета
Д 212.034.02 или выслать ваш отзыв на автореферат в двух экземплярах с заверенными подписями по адресу 394613, г. Воронеж, ул. Тимирязева, 8, Воронежская государственная лесотехническая академия, ученому секретарю.
Тел. 8-4732-53-72-40, факс 8-4732-53-72-40.
Лысыч Михаил Николаевич
Обоснование параметров рабочего органа и
режимов работы лесного культиватора
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Подписано к печати 12.05.2010 г. Заказ №
Объем – Усл. п. л. Тир. 100 экз.
Типография Воронежского ЦНТИ
394730, г. Воронеж, пр. Революции, 30