

Исследование и разработка средств защиты статического компенсатора реактивной мощности с цифровой системой управления
На правах рукописи
КОШЕЛЕВ КОНСТАНТИН СЕРГЕЕВИЧ
Исследование и разработка средств защиты статического компенсатора реактивной мощности с цифровой системой управления
Специальность 05.09.01. «Электромеханика и электрические аппараты»
АВТОРЕФЕРАТ
Диссертация на соискание ученой степени
кандидата технических наук
МОСКВА 2008
Работа выполнена в Государственном Образовательном Учреждении Высшего Профессионального Образования Московском Энергетическом Институте (Техническом Университете) на кафедре Электрических и Электронных аппаратов
| Научный руководитель – | доктор технических наук, профессор Розанов Юрий Константинович |
| Официальный оппонент - | доктор технических наук, профессор Лукин Анатолий Владимирович кандидат технических наук, доцент Буре Ирина Георгиевна |
| Ведущее предприятие - | Высоковольтный научно-исследовательский центр - филиал Государственного унитарного предприятия "Всероссийский электротехнический институт имени В.И.Ленина" (ВНИЦ ВЭИ, г. Истра) |
Защита состоится « 19 » декабря 2008 г.
на заседании диссертационного совета Д 212.157.15 при ГОУВПО МЭИ (ТУ)
в аудитории Е-205 в 15 час. 00 мин.
по адресу: 111250, Москва, Красноказарменная ул., д.13.
С диссертацией можно ознакомиться в библиотеке ГОУВПО МЭИ (ТУ).
Отзывы в двух экземплярах, заверенные печатью учреждения, просим направлять по
адресу: 111250, Москва, Красноказарменная ул., д.14, Ученый совет МЭИ (ТУ).
Автореферат разослан «____»___________________ 2008 г.
Ученый секретарь
диссертационного совета Д 212.157.15
к.т.н. доц. Рябчицкий М.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Нормальная работа потребителей электроэнергии и выполнение возложенных на них функций зависит от совокупности характеристик потребляемой ими электроэнергии, которые определяют ее качество. Благодаря широкому распространению электроэнергии проблема ее качества приобретает все большее значение. Она усугубилась вместе с развитием и широким внедрением в промышленности силовых электронных преобразователей. Это связано с их негативным влиянием на сеть, которое проявляется в основном в виде увеличения реактивной мощности и мощности искажения.
Последствия увеличения доли реактивной нагрузки проявляются в виде снижения пропускной способности электроэнергетических систем (ЭЭС), увеличение дополнительных потерь от передачи реактивной мощности, снижении пределов статической и динамической устойчивости, недопустимых уровней напряжения в узлах ряда энергосистем.
Решить данную проблему позволяет установка в ЭЭС специальных компенсирующих устройств (КУ) или, иными словами, компенсация реактивной мощности. Традиционно в качестве компенсаторов реактивной мощности используются системы типа СТК на базе реактора и тиристорного преобразователя. Развитие силовой электроники привело к созданию новых видов силовых электронных ключей и схемотехнических решений, позволяющих более эффективно решать задачу компенсации реактивной мощности. В настоящее время одним из наиболее перспективных направлений является создание статических компенсаторов реактивной мощности (СТАТКОМ), которые представляют собой устройства на базе преобразователя напряжения на полностью управляемых ключевых элементах, который способен генерировать ток любой фазы относительно напряжения сети.
СТАТКОМ служит как для генерации реактивной мощности в сеть, так и для компенсации реактивной мощности сети. На стороне переменного тока включаются дроссели для фильтрации гармоник тока, обусловленных ШИМ модуляцией напряжения преобразователя.
Функционирование СТАТКОМа связано с необходимостью управления динамическими и статическими процессами, характерными для импульсных и нелинейных систем. Решение задач управления статическим компенсатором при помощи исключительно аналоговых средств затруднительно. Отличительной особенностью цифровых систем управления является возможность создания сложнейших алгоритмов управления и защиты, а также легкость их модификации и отладки. Цифровая система управления превосходит по точности аналоговую, поскольку ее параметры не изменяются с течением времени и не зависят от таких внешних факторов, как температура, влажность и т.п., что присуще практически всем аналоговым системам. Ограничение на точность цифровой системы управления накладывает точность оцифровки аналогового сигнала модулем АЦП. Быстродействие цифровых систем управления может уступать аналоговым системам. Однако, в последнее время, в связи с постоянным увеличением тактовой частоты ядра процессоров, это различие нивелируется. Поэтому основным направлением развития систем управления и защиты будет создание точных и быстродействующих систем с использованием, как аналоговых средств, так и цифровых сигнальных процессоров и микроконтроллеров.
Следует отметить, что вопросы построения силовой части компенсаторов и вариантов реализации алгоритмов управления в преобразовательной технике рассмотрены достаточно подробно. Не смотря на это, актуальными задачами в этой области остаются: создание методик расчета и оценки характера аварийных режимов; разработка алгоритмов защиты и выявления сбоев в оборудовании СТАТКОМа. Данная задача и определила тему диссертационной работы.
Цель работы. Проведение теоретических и экспериментальных исследований, направленных на создание защитного комплекса устройства СТАТКОМ на основе преобразователя напряжения с цифровой системой управления. Что позволит эффективно решить задачи: стабилизации напряжения в точке подключения и увеличению пропускной способности линии, следовательно, положительно влияет на устойчивость системы передачи при аварийных режимах.
Достижение цели исследования потребовало решение следующих научно-исследовательских и практических задач:
- Проведение аналитического обзора современных научно-технических решений в области управления аппаратами компенсации реактивной мощности. Выявление наиболее перспективных принципов регулирования параметров электроэнергии с применением силовых электронных приборов;
- Разработка методики расчета аварийных процессов в основных элементах силовой части компенсатора;
- Разработка математических моделей СТАТКОМа и его основных компонентов;
- Создание методики проектирования и расчета способов и средств защиты СТАТКОМа в аварийных режимах;
- Создание и отладка макетного образца СТАТКОМа. Анализ эффективности предложенного комплекса защитных мер.
Методы исследования. Для решения поставленных задач в работе предполагается использование объектно-ориентированных программ моделирования типа «Matlab» и «PSpice». В числе математических методов, анализ импульсной модуляции напряжений и токов электрических цепей, pq-теория «мгновенной» мощности Хирофуми Акаги, методы преобразования трехфазной системы координат (abc) в двухфазные dq и. При разработке программной части защитного комплекса использовался метод пошаговой отладки в среде программирования «Code Composer». Применение методов теории электрических цепей для расчета аварийных режимов работы СТАТКОМа при определении вариантов защиты.
Обоснование и достоверность результатов. Справедливость теоретических положений подтверждается использованием апробированных методов анализа электромагнитных процессов в силовых электронных устройствах и корректностью принятых допущений, а также результатами компьютерного и физического моделирования.
Научная новизна. На защиту выносятся следующие результаты:
- Методика расчета и моделирования аварийных процессов в оборудовании СТАТКОМ;
- Методика проектирования программного комплекса защитных мер для компенсатора реактивной мощности;
- Принцип построения цифровой системы контроля состояни компенсатора в различных режимах. Алгоритм функционирования системы защит от нештатных ситуаций, позволяющий повысить надежность работы оборудования в целом;
- Математическая модель СТАТКОМа, позволяющая исследовать и анализировать аварийные процессы компенсатора в случае функциональных сбоев оборудования СТАТКОМа.
Практическая ценность. В результате выполненной работы создана эффективная система защиты статического компенсатора реактивной мощности с использованием цифрового процессора. Полученные результаты служат исходными данными для проектирования защитных систем устройств компенсации на основе преобразователей напряжения при создании «гибких линий». Некоторые результаты работы изложены в отчетах по научно-исследовательским работам ОАО «ВНИИЭ»: «Разработка и создание макета СТАТКОМа напряжением 400В с микропроцессорной системой управления», «Изготовление и поставка статического устройства FACTS типа СТАТКОМ мощностью 50Мвар для ПС Выборгская» 2004-2007г.
Реализация работы. Полученные результаты работы использованы в работах проводимых кафедрой ЭиЭА МЭИ (ТУ) совместно с Филиалом ОАО «НТЦ электроэнергетики» - ВНИИЭ. Техническая реализация и экспериментальная отработка была выполнена на макетном образце СТАТКОМа, созданном в ОАО «ВНИИЭ». Макет предназначен для подключения к трехфазной сети 0,25кВ, 50 Гц. Установленная мощность макета 2,2 кВАр. Номинальное действующее значение основной гармоники тока макета 5,1 А.
Апробация. Результаты диссертационной работы докладывались и обсуждались на международных конференциях МКЭЭЭ -2006 (Крым, Алушта), СЭЭ-2006(Украина) а также на заседаниях кафедры ЭиЭА с 2006-2008г.
Публикации. По теме диссертации опубликовано 2 печатные работы.
Структура и объем работы. Диссертационная работа состоит из введения, пяти глав, заключения и списка литературы. Объем работы составляет 191 стр. и содержит 111 рисунка, 5 таблиц, 61 наименование списка литературы.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы, сформулированы цель, задачи исследования, научная новизна и практическая ценность диссертационной работы.
В первой главе подробно рассмотрены составляющие баланса реактивной мощности ЭЭС. Отмечено, что выработка и потребление электрической энергии на переменном токе характеризуются передачей по электрической сети как активной, так и реактивной мощности. Поэтому в каждый момент времени в ЭЭС существует баланс полной мощности. Для реактивной мощности условие баланса имеет следующий вид:
![]() (1)
(1)
где QГ – суммарная генерируемая мощность; QН – суммарная мощность нагрузки потребителей; Q – суммарные потери реактивной мощности в элементах сети. Потерями реактивной мощности в элементе сети называется разница между потоками реактивной мощности в начале и в конце элемента. Величина этих потерь определяется протекающим по элементу током и реактивным сопротивлением элемента X, которое связанно с процессами возникновения и распространения переменного электрического поля:
![]() (2)
(2)
Балансу реактивной мощности соответствует некоторый уровень узловых напряжений. Так как передача мощности по электрической сети сопровождается потерями напряжения в ее элементах, то, в отличие от частоты, напряжения в узлах сети будут различаться.
Выделены основные потребители реактивной мощности, являющиеся причиной изменения питающего напряжения в узлах ЭЭС. Определены группы потребителей, наиболее критичные к отклонениям питающего напряжения.
Показана важность стабильности питающего напряжения для надежной работы потребителей электроэнергии. Отмечено, что наиболее частым видом ухудшения качества электроэнергии, как в России, так и за рубежом является пониженное напряжение, а также кратковременные провалы (1-3 периода) напряжения сети. Как свидетельствует накопленный к настоящему времени опыт, применение аппаратуры для создания гибких линий позволяет существенно изменить характеристики энергосистем. В ряде случаев это позволяет обойтись без строительства новых линий для обеспечения передачи растущих потоков мощности, что стало в последнее время затруднительным в связи с целым рядом экономических, экологических и социальных проблем. Таким образом, проблема разработки и создания устройств, позволяющих эффективно решать задачу компенсации реактивной мощности, является актуальной на сегодняшний день.
Рассмотрены различные устройства, предназначенные для компенсации реактивной мощности. Показаны их преимущества и недостатки. Обзор средств компенсации реактивной мощности показал, что большинство из существующих методов не удовлетворяют растущим требованиям к устройствам компенсации, входящим в комплекс «гибких линий», поэтому их применение не всегда эффективно и экономически целесообразно. Сделан вывод о предпочтительном применении современных средств компенсации, способных эффективно осуществлять регулирование питающего напряжения сети.
Развитие силовой электроники привело к созданию новых видов силовых электронных ключей и схемотехнических решений, таких как статический компенсатор реактивной мощности (СТАТКОМ), который повторяет работу синхронного компенсатора. На рис.1. представлена структурная схема СТАТКОМа.

- Структурная схема СТАТКОМа
Отмечено, что трёхфазная мостовая схема является базовой для компенсаторов малой и средней мощности. В системах большой мощности и высокого напряжения на основе этой схемы могут быть созданы многоуровневые и многоячейковые преобразователи с различной элементной базой.
Задача системы управления СТАТКОМа заключается в регулировании реактивной мощности, выдаваемой или потребляемой устройством. Управление реактивной мощностью осуществляется посредством создания заданного напряжения преобразователем. Напряжение, приложенное к фазному реактору, является разницей напряжений сети и преобразователя. Активное сопротивление реактора незначительно, поэтому ток в фазе СТАТКОМа отстаёт на 90 от напряжения, приложенного к реактору. При этом, если напряжение преобразователя совпадает по фазе с напряжением сети, то ток реактора имеет только реактивную составляющую, происходит обмен с сетью реактивной мощностью. Реактивная мощность СТАТКОМа имеет емкостной характер, если амплитуда напряжения преобразователя больше амплитуды напряжения сети. Реактивная мощность имеет индуктивный характер, если амплитуда напряжения преобразователя меньше амплитуды напряжения сети.
В свою очередь, регулирование активной мощности, возможно посредством создания напряжения преобразователя, отстающего или опережающего по фазе напряжение сети. Активная мощность потребляется преобразователем, если напряжение преобразователя отстает по фазе от напряжения сети и отдается в сеть, если напряжение преобразователя опережает по фазе напряжение сети. Таким образом, управлением фазой и амплитудой напряжения преобразователя, осуществляется контроль реактивной и активной мощностями СТАТКОМа.
Анализ отечественной и зарубежной литературы, посвященной вопросам создания и применения компенсаторов типа СТАТКОМ показал, что не смотря на большой объем информации о построении силовой части компенсаторов, реализации управляющей части СУ и разработке алгоритмов цифрового управления, не достаточно освещенным является вопросы:
- методик расчета и оценки предельных и аварийных режимов работы СТАТКОМа;
- диагностики аварийных процессов;
- разработки алгоритмов программного комплекса защит.
Указанные обстоятельства ограничивают эксплуатационные и функциональные возможности компенсаторов реактивной мощности. В этой связи определены задачи дальнейшего исследования:
- разработать методику расчета аварийных процессов и предельных параметров функционирования оборудования СТАТКОМа;
- создать методику проектирования программного комплекса защитных мер с учетом различных режимов работы оборудования СТАТКОМа;
- разработать алгоритмы программных средств защиты и средств выявления функциональных сбоев в оборудовании компенсатора;
- создать математические модели, позволяющие определить круг задач, стоящих перед программной частью комплекса защитных мер, выявить наиболее опасные с точки зрения повреждения оборудования режимы.
Во второй главе приведена методика проектирования макетного образца СТАТКОМа небольшой мощности с учетом масштабных коэффициентов. Методика позволяет создать прототип компенсатора мощностью 50МВАр для проведения предварительных исследований при разработке и наладке алгоритмов управления и программных защит.
В рассматриваемом устройстве, предназначенном для решения комплекса задач гибкого управления потоками реактивной мощности принципиально необходимы запираемые силовые ключи. В настоящее время выделяются два типа мощных полупроводниковых ключей: запираемые тиристоры с интегрированным электродом управления - IGCT и транзисторы с изолированным управляющим электродом - IGBT. Сравнительная техническая оценка IGBT-модулей и IGCT-тиристоров, включая общие потери в преобразователе, показала несомненные технические преимущества IGBT-модулей. Этот вид силового прибора, в отличие от IGCT-тиристоров еще не достиг своего технологического «потолка». Поэтому, для разработки оборудования СТАТКОМ выбраны IGBT-транзисторы.
В свою очередь, преобразователь напряжения может быть выполнен на базе различных структурных схем. Выбор структуры ПН важен при оценке показателей удельной стоимости оборудования таких устройств. Среди наиболее распространенных структур ПН можно выделить следующие:
- на базе использования многофазных трансформаторов;
- многоуровневые структуры без общего звена постоянного тока;
- многоуровневая структура с коммутируемыми конденсаторами;
- различные варианты мостовых схем.
Для решения всего комплекса задач гибкого управления потоками мощности требуются такие решения по структуре преобразователя, которые позволяют на базе унифицированных, стандартизированных, технологически отработанных компонентов создавать оборудование различной мощности, напряжения и назначения. Анализ достоинств и недостатков вышеуказанных схем позволил выделить наиболее подходящую структуру преобразователя напряжения (рис.2).

- 3-х уровневая мостовая структура инвертора напряжения с 18-ю запираемыми вентилями
Такая структура обеспечивает предельные параметры по мощности (без параллельного соединения приборов).
Алгоритм управления вентилями ПН во многом определяет варианты развития нештатных ситуаций при функциональных сбоях в оборудовании СТАТКОМа. Принятый алгоритм управления вентилями ПН является одним из наиболее перспективных и относится к классу алгоритмов широтно-импульсного регулирования (ШИР). Моменты коммутации вентилей вычисляются данным алгоритмом исходя из задания первой гармоники генерируемого напряжения и равенства нулю заданного ряда высших гармоник в генерируемом напряжении. В данное время решена задача подавления четырех высших гармоник с кратностями 5,7,11,13. В установившемся режиме коммутации располагаются симметрично относительно переходов первой гармоники генерируемого напряжения через ноль. Всего за период происходит фиксированное количество (20) коммутаций в каждой фазе.
Информация о задачах, стоящих перед макетным образцом, а также конфигурации ПН дает возможность осуществить расчет силовой части статического компенсатора. В качестве прототипа при создании макета было выбрано наиболее перспективное в России статическое устройство компенсации типа СТАТКОМ мощностью 50 МВАр для ПС «Выборгская», разработанное в научно-исследовательском институте электроэнергетики (ОАО «ВНИИЭ»). Параметры макета рассчитывались с учетом принятых масштабных коэффициентов по напряжению (kU=63) и по току (kI=360). Предложенная методика расчета силовой части изображена на рис.3.

- Методика расчета элементов силовой схемы компенсатора
На этапе проектирования силовой части макетного образца проведен расчет параметров функционирования, выбор силового модуля, расчет параметров фазных реакторов, выбор типа конденсаторного накопителя с учетом ряда специфических параметров и особенности работы ПН, выбранной конфигурации. Повышенные пульсации напряжения увеличивают уровень воздействия напряжением на силовые транзисторы. Основным источником пульсаций на конденсаторной батареи являются пульсации напряжения средней точки КБ под действием тока нейтрали третьей гармоники. Ток в плече КБ предложено оценивать по полученному в работе соотношению амплитуд первой гармоники фазных токов компенсатора и третьей гармоники тока в половинах КБ.
![]() . (3)
. (3)
Задав величину пульсаций на одном плече конденсаторной батареи под действием тока нейтрали, можно оценить емкость плеча КБ:
 . (4)
. (4)
Другой критерий выбора КБ это время, требуемое для разряда/заряда КБ при изменении знака мощности. В режиме статики уровень напряжения на КБ задается амплитудой входного напряжения, коэффициентом модуляции и падением напряжения на фазных реакторах.
Время, необходимое для разряда/заряда КБ при изменении знака мощности можно оценить по (5):
 (5)
(5)
где ES_max – амплитуда фазного напряжения сети, Imax – амплитуда фазного тока, K – относительное напряжение (к ES_max) на фазном реакторе, Km – номинальное значение коэффициента модуляции. CКБ – емкость КБ.
Компенсатор мощности содержит полупроводниковый преобразователь напряжения, являющийся системой с импульсной модуляцией выходных параметров – токов и напряжений, поэтому функционирование компенсатора связано с необходимостью управления динамическими и статическими процессами характерными для импульсных и нелинейных систем. При разработке комплекса защитных мер необходимо учитывать и особенности функционирования алгоритмов управления. Для применения в макете решено использовать систему управления, вычисление напряжения преобразователя в которой основано на использовании синхронной системы координат. Особенностью этого метода вычисления является наличие блока синхронизации. Поскольку передача энергии между компенсатором и сетью имеет место только на основной гармонике, система управления формирует опорные сигналы, отражающие текущее состояние основной гармоники фазных напряжений. Опорные сигналы внутреннего генератора должны быть синхронизированы с первой гармоникой напряжения сети в точке подключения.
На рис.4 изображена блок-схема алгоритма использованной СУ.
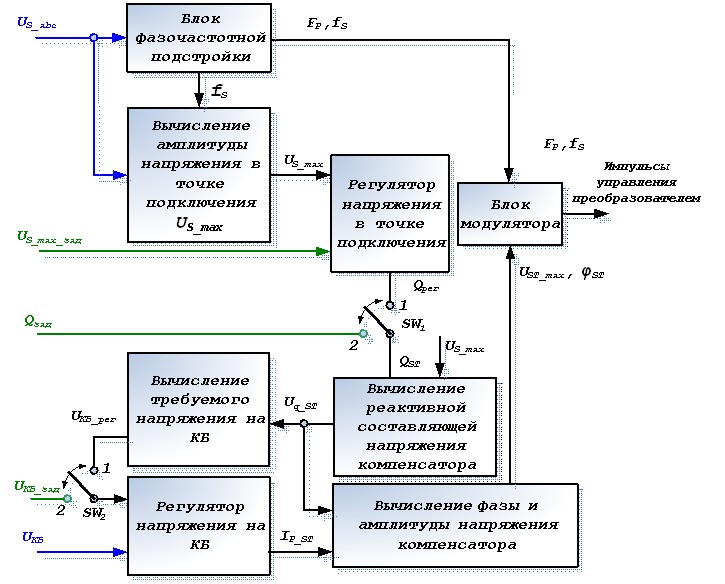
- Алгоритм управления СТАТКОМом
В алгоритме предусмотрена возможность изменения режимов работы оборудования СТАТКОМ. При помощи программного переключателя sw1 можно выбрать задачу, стоящую перед компенсатором:
- стабилизацию напряжения в точке подключения;
- выдачу заданной оператором реактивной мощности, исходя из нужд системы электроснабжения.
Переключатель sw2 отвечает за выбор варианта задания уставки напряжения на КБ. В первом случае уставка (UКБ_рег) рассчитывается исходя из условия постоянства коэффициента модуляции, во втором случае уставка жестко задается оператором.
Особенность преобразователя, работающего на сеть, является относительно стабильная частота. В связи с этим, алгоритм определения частоты сетевого напряжения основан на определении времени между двумя ближайшими моментами перехода синусоидального сигнала из положительной области в отрицательную. Алгоритм синхронизации обеспечивает «привязку» внутреннего генератора опорных сигналов для любого состояния сети, включая переходные и аварийные процессы. Особенностью работы регулятора активной мощности является необходимость приращения этой составляющей мощности с учетом незначительной её величины (1-1.5% от проходной мощности) угол сдвига при этом достаточно мал, и составляет угол 0.573…0.86 град.эл. Для устойчивой работы ПН необходимо, чтобы дискретность формирования такого угла была бы не более 5% от угла сдвига. Это означает, что дискретность изменения угла должна быть не более 0.029…0.043 град.эл.
Алгоритм, определяющий амплитуду прямой последовательности напряжения сети, основан на применении dq преобразования. Проекции обобщённого вектора напряжения сети (S) на оси вращающейся системы координат (dq) обозначаются как Sd и Sq.![]() Таким образом, обобщённый вектор раскладывается на две ортогональные составляющие, вращающиеся синхронно с вектором напряжения сети:
Таким образом, обобщённый вектор раскладывается на две ортогональные составляющие, вращающиеся синхронно с вектором напряжения сети:
![]() , (6)
, (6)
где Sm – амплитуда обобщённого вектора, ![]() – круговая частота, равная круговой частоте сети.
– круговая частота, равная круговой частоте сети.
Вычисление уставки напряжения на КБ для компенсатора реактивной мощности типа СТАТКОМ осуществляется для установившегося режима, в котором активная мощность равна нулю. В таком режиме падения напряжений на фазных реакторах преобразователя (UL) формируются только реактивными токами. Активная составляющая токов не учитывается.
Блок-схема канала регулирования напряжения в точке подключения и канала регулирования напряжения на КБ изображены на рис.5 и рис.6 соответственно.

- Регулятор напряжения в точке подключения
В обоих алгоритмах канале задания присутствует инерционное звено, которое предотвращает возможность быстрого или скачкообразное изменение сигнала задания, которые вносят дестабилизирующий эффект в канал регулирования. Слежение за напряжением задания сети осуществляется с помощью пропорционального регулятора, на вход которого подаются значения вычисленной амплитуды напряжения в точке подключения (US_max) и амплитуды (US_max_зад). На выходе регулятора образуется реактивная составляющая мощности компенсатора (Qрег), которую необходимо выдать/потребить в сеть.
В регуляторе активной мощности используется передаточная функция типа:
 , (7)
, (7)
Выходной величиной регулятора является значение активного тока компенсатора, необходимого для поддержания напряжения на КБ на заданном уровне.

- Регулятор напряжения в точке подключения
В блоке вычисления реактивной составляющей напряжения компенсатора расчет осуществляется на основе требуемой реактивной мощности (Qрег), амплитуды напряжения сети (US_max) и известной величины сопротивления фазного реактора (XL). Расчетное выражение выглядит так:
 , (8)
, (8)
Разработанные для макета СТАТКОМа алгоритмы управления позволяют воспроизводить полный спектр режимов работы компенсатора, а также предоставляют дополнительные возможности при воспроизведении нештатных режимов работы и функциональных сбоев.
Разработанная методика проектирования макетного образца позволяет создать прототип компенсатора мощностью 50МВАр значительно меньшей мощности для проведения предварительных исследований при разработке и наладке алгоритмов управления и программных защит.
В третьей главе для организации защитного комплекса проведен расчет предельных параметров функционирования компенсатора. Так как полупроводниковые компоненты, используемые в силовой технике, должны быть защищены от перегрузок по току и напряжению в любых условиях работы. То есть должны быть исключены режимы, выходящие за рамки области безопасной работы (ОБР), приводимой в справочных данных транзистора. Поэтому очень важно не допускать потенциальных перегрузок и своевременно переводить компенсатор в режим, лежащий внутри ОБР преобразователя, пресекая возникающие аварийные ситуации. В качестве исходных параметров для расчета использованы данные из технических требований на высоковольтный преобразователь напряжения типа СТАТКОМ (50МВАр).
На первом этапе проведена координация напряжения оборудования компенсатора. В таблице 1 показано рассчитанное соотношение уровней напряжения сети, рабочего напряжения на вентилях в режиме холостого хода и под нагрузкой. Где красная линия ограничивает максимальный уровень рабочего напряжения на вентиле, синяя линия разделяет режимы работы под нагрузкой (ниже синей линии) и без тока (выше синей линии).
Таблица 1.
| постоянное напряжение на IGBT вентиле | |
| Максимальное допустимое напряжение на вентиле IGBT | 397В (25кВ) |
| Защитный уровень вентиля от перенапряжения | 350В (22кВ) |
| Кратковременное (0,1с) повышение напряжения сети на 58% - 439В (27,65кВ) холостой ход | 310В (19,6кВ) |
| Кратковременное (1с) повышение напряжения сети на 50% - 417В (26,25кВ) холостой ход | 295В (18,6кВ) |
| Кратковременное (20с) повышение напряжения сети на 25% - 347В (21,9кВ) холостой ход | 246В (15,5кВ) |
| Номинальное напряжение сети - 250В(15,75кВ) 1,5-кратная перегрузка по току | 230В (14,5кВ) |
| Повышенное напряжение сети - 278В(17,5кВ) номинальная, генерируемая мощность | 229В (14,38кВ) |
| Кратковременное (1200с) повышение напряжения сети на 10% - 306В (19,25кВ) холостой ход | 216В (13,6кВ) |
| Номинальное напряжение сети - 250В(15,75кВ) номинальная, генерируемая мощность | 212В (13,37кВ) |
| Повышенное напряжение сети - 278В(17,5кВ) холостой ход | 196В (12,37кВ) |
| Номинальное напряжение сети - 250В(15,75кВ) холостой ход | 177В (11,13кВ) |
Во вторых рассмотрены возможные воздействия на вентиль током и ограничения, накладываемые на вентиль по рассеиваемой мощности при полной его загрузке по току. Показано, что термические удары, воздействующие на силовой модуль в процессе его эксплуатации, являются основными факторами, определяющими его срок службы.
Количество циклов до отказа Nf связано с градиентом температуры Tj при термоциклировании:
![]() (9)
(9)
и средней температурой кристалла Tj_ср :
![]() (10)
(10)
в соответствии с выражением:
 (11)
(11)
где kb - постоянная Больцмана. Выражение 11 позволяет получить хорошую аппроксимацию результатов тестов с помощью метода наименьших квадратов по трем параметрам: константы А, показателя степени и энергии активации Eа.
Рассмотрены возможные воздействия на оборудование СТАТКОМа, несоответствие которых параметрам силового оборудования может привести к аварии.
По месту возникновения аварии разделены на внешние и внутренние. Под внешними понимаются аварийные ситуациями, появление которых напрямую не связанно с работой оборудования. Возникают такие аварии в точках внешнего подключения оборудования СТАТКОМ к питающей сети из-за процессов, протекающих в примыкающих цепях. Среди внешних выделены три основных вида аварий:
- Квазистационарные воздействия от нескольких периодов (0,1с) до нескольких минут и вызваны они сбросом нагрузок различной величины в примыкающей сети на различном удалении от места подключения.
- Коммутационные воздействия от нескольких сотен микросекунд до единиц миллисекунд. Кратность коммутационного перенапряжения достигает значения 1,8.
- Грозовые воздействия от единиц до десятков микросекунд и связанны они с непосредственным воздействием внешних факторов на оборудование СТАТКОМ, размещенное на открытых площадках. Кратность грозовых перенапряжений равна 2,1.
Под внутренними понимаются аварии, воздействующие на внутренние цепи оборудования и параметры, которых (уровень, длительность, форма) определяются, главным образом, процессами в оборудовании компенсатора.
Причины, приводящие к возникновению внутренних аварийных режимов разделены на два вида:
- Нарушение нормального функционирования системы управления, а также при потере управляемости одного или нескольких вентилей, при которой нарушается порядок переключения вентилей;
- Резкое необратимое изменение схемы или параметров силового оборудования из-за пробоя основной изоляции или пробоя одного или нескольких вентилей.
Аварии, вызванные выходом из строя транзисторов по причине электрического или теплового пробоя, являются, как правило, наиболее тяжелыми, так как они сопровождаются протеканием в преобразователе больших токов, а также повышенными тепловым и электродинамическим воздействиями. Однако, следует отметить, что ряд внутренних аварий не вызывает значительных изменений токов в элементах силовых цепей. Такого рода аварии приводят к недопустимым отклонениям напряжения, повышенным уровням пульсаций на стороне постоянного тока. Следовательно, возникает необходимость в своевременном выявлении и адекватной реакции на аварии такого рода.
В программном пакете OrCAD, учитывающем характеристики реальных электронных компонентов входящих в состав силовой части создана математическая модель компенсатора (рис.7). При компьютерном анализе преследовались следующие цели:
- подтверждение основных результатов расчета силовой части СТАТКОМа;
- проведение анализа аварийных режимов связанных со сбоями в работе СУ и ШУ, при возникновении режима КЗ двухполюсной шины и пробое одного из вентилей различных режимах работы компенсатора;
- выявление наиболее опасных нештатных режимов для внесения предложений по их выявлению.
При создании математической модели были приняты следующие допущения:
- алгоритм синхронизации с напряжением сети не оказывает влияния на работу компенсатора при появлении изучаемых нештатных ситуаций;
- транзисторный ключ можно заменить последовательным соединением управляемого сопротивления и диода;
- активная мощность на выходе регулятора активной мощности пропорциональна углу поворота вектора напряжения инвертора относительно вектора напряжения сети в точке подключения.
Параметры элементов схемы выбраны в соответствии с расчетами, проведенными в главе 2. Преобразователь напряжения состоит из 18-ти ключевых элементов с обратными диодами. В каждой фазе можно выделить по 3 типа вентилей: Sx1, Sx2 – фазные вентили, Sx3, Sx4 – полюсные вентили и Sx5, Sx6 – нулевые вентили. Сеть представляет собой идеальный источник напряжения бесконечной мощности. Конденсаторная батарея состоит из двух половин (С_poz и С_neg), общая точка которых заземлена. В качестве фазных реакторов компенсатора использовано последовательное соединение индуктивностей (La, Lb, Lc) и активных сопротивлений, задающих добротность реакторов.

- Силовая часть математической модели СТАТКОМа
При сбоях в работе СУ и ШУ выделены и рассмотрены следующие, наиболее вероятные варианты искажения последовательности импульсов управления:
- пропуски одного или нескольких импульсов управления в одном из трех типов вентилей;
- остановка смены комбинаций импульсов управления.
Выход из строя или потеря управляемости любого вентиля показали, в определенный момент приводит к режиму короткого замыкания одной из половин КБ. На рис.8. изображены возможные контуры протекания токов КЗ при пробое полюсного (а), нулевого (б) или фазного (в) вентиля.

(а) (б) (в)
- Контуры протекания токов КЗ при пробое полюсного (а), нулевого (б), фазного (в) вентилей
По результатам моделирования выявлены 3 режима, в которых авария вентиля не проявляется вплоть до возникновения режима КЗ одной из половин КБ:
- Пробой полюсного вентиля в режиме потребления в момент подачи импульса управления пп1;
- Пробой нулевого вентиля в режиме потребления в момент подачи импульса управления нп1;
- Пробой фазного вентиля в режиме потребления.
Защититься от аварий такого рода при помощи программных средств защиты невозможно. Существует необходимость в создании быстродействующей защиты от протекания токов короткого замыкания в элементах ПН. В преобразователях малой и средней мощности эта защита реализуется с использованием интеллектуальных драйверов.
Также рассмотрен режим возникновения короткого замыкания двухполюсной шины точка, возможного при снижении уровня внутренней изоляция нескольких самодельных изоляторов. В этом случае появляется дополнительный контур протекания тока (рис.9).

- Дополнительный контур протекания токов при КЗ двухполюсной шины СТАТКОМа
Результаты моделирования показали, что большая часть сбоев, связанных с работой СУ и ШУ, а также возникновением КЗ двухполюсной шины, проявляют себя в качестве отклонения токов в фазах СТАТКОМа.
В четвертой главе предложена классификация средств защиты. Показано, что нештатные ситуации в процессе эксплуатации оборудования могут быть выявлены и устранены различными видами защитных средств (рис.10).

- Варианты выявления нештатных режимов работы СТАТКОМа
Пассивные защиты, которые ограничивают опасное воздействие до уровня, допустимого для оборудования путем, главным образом, поглощения и последующего рассеивания избыточной энергии.
Активные защиты, которые средствами самого оборудования позволяют выявить опасный режим работы и предотвратить возможные аварийные последствия. Активные защиты можно разделить на ряд подклассов, это:
- максимальные зашиты;
- тепловые защиты;
- функциональные защиты;
- различные виды блокировок;
- самоконтроль.
Под максимальными защитами принято понимать защиты, характеризующиеся большой скоростью реакции на превышение контролируемым параметром предустановленной максимальной величины. Тепловые же процессы являются результатом перегрева и характеризуются относительно медленной скоростью протекания. Функциональные защиты связанны с отклонением от расчетной величины контролируемых параметров компенсатора или изменением ожидаемого характера протекающих процессов. Функциональные защиты выполняются преимущественно в программной части СУ, так как нуждаются в применении математического аппарата. Блокировки и самоконтроль объединены в классы, в зависимости от того, какая часть СТАТКОМа может быть оставлена в работе при выполнении условия блокировки или срабатывании защиты.
Произведена дифференциация функций, возлагаемых на программную и аппаратную части защитного комплекса. Разделение осуществлено в соответствии с особенностями, выделенными для этих типов защит.
На рис.11 предложен вариант организации программных защит компенсатора, необходимые их виды и входные величины, требуемые для их реализации. К входным величинам программного комплекса защит относятся не только данные с первичных датчиков и прерывания от внешних (аналоговых) защит, но и данные о состоянии внешних органов управления: состояние блока автоматики (БА), наличие разрешающего сигнала импульсов управления (ИМП). Эти данные позволяют обеспечить адаптивную программную защиту во всех режимах работы статического компенсатора.

- Организация программных защит компенсатора
Показано, что одним из решений, которое позволит снизить задержку при выявлении нештатных ситуаций, является использование методов аппроксимации и восстановления функций на основе дискретных данных, полученных с АЦП. Однако, в результате проведенного анализа, сделан вывод о том, что для данного случая необходимая точность расчета может быть достигнута только при повышении частоты выполнения программы как минимум в 2 раза.
Детально рассмотрена реализация программных защит с учетом специфики цифровой обработки сигналов. Приведены подробные блок-схемы алгоритмов защит:
- по превышению уровня напряжения на половинах КБ;
- по превышению уровня напряжения на стороне переменного тока;
- по наличию «утечек» (токи в фазах ПН без сигнала разрешения импульсов управления;
- по превышению уровня токов в фазах ПН;
- по отклонению токов в фазах ПН от расчетных величин (функциональная);
- по качеству синхронизации с напряжением сети в точке подключения;
- сбору сигнала готовности и программных блокировок.
Разработанный комплекс программных мер, с учетом специфических настроек, в сочетании с указанными аппаратными средствами может быть с успехом использован в большинстве современных устройств преобразовательной техники. Предложен алгоритм функциональной защитой по току, который нацелен на выявление сбоев в работе оборудования СТАТКОМа. Нарушение в работе оборудования обнаруживается до момента выхода мгновенных значений фазных токов и напряжения на половинах КБ за предельные границы функционирования оборудования, что позволит значительно повысить надежность защищаемого оборудования в целом.
В пятой главе проведено физическое моделирование на макете СТАТКОМа. Макет компенсатора предназначен для проведения экспериментальных исследований на физическом объекте работы алгоритмов программных защит. Кроме того, макет может быть использован для отработки на реальном объекте математических моделей, оптимизации алгоритмов связанных с работой преобразователя напряжения и уточнения расчетов элементов силовой части компенсатора.
Среди всех вариантов нештатных режимов, рассмотренных в четвертой главе, выделены наиболее интересные случаи для каждого из четырех видов функциональных сбоев. Также в качестве возможного режима возникновения сбоя в работе оборудования необходимо также осуществлен опыт аварии ПСН.
Для проведения физического эксперимента был создан макет устройства мощностью
2,2 кВА с микропроцессорной системой управления. Установленная мощность макета СТАТКОМа составила 2,2кВАр. Номинальное значение основной гармоники тока каждой из фаз 5,1А rms. В схеме макета использованы силовые IGBT-модули типа М2ТКИ-50-06. Конденсаторная батарея в цепи постоянного тока имеет суммарную емкость 232мкф и максимальное рабочее напряжение 1кВ, фазные реакторы имеют индуктивность 18мГн. Расчет основных параметров силового оборудования проведен в соответствии с методикой, изложенной во второй главе.
Кроме программного комплекса защитных мер в макете предусмотрены элементы аппаратной защиты и самоконтроля:
- Сторожевой таймер микроконтроллера, защищающий от сбоев программы микроконтроллера.
- Предложена схема контроля питания собственных нужд, которая выдает сигнал ошибки при выходе любого из контролируемых напряжений за допустимые рамки, как в сторону просадки, так и в сторону повышения напряжения. Таким образом, исключается режим неконтролируемого функционирования элементов СУ.
- Для обеспечения внешнего контроля работоспособности микроконтроллера предложено использовать схему контроля функционирования МК. Применение такого способа контроля исключает ввод компенсатора в работу без готовности программного комплекса и значительно повышает надежность оборудования.
- В качестве быстродействующей индивидуальной защиты силовых транзисторов применена драйверная защита. Необходимость ее применения в макете обусловлена тем, что предполагается воспроизведение аварийных режимов.
В качестве измерительного средства при проведении экспериментальных исследований использовался многофункциональный цифровой осциллограф фирмы LeCroy.
Проведенные эксперименты показали, что обнаружение сбоев в работе оборудования и запрет импульсов управления в большинстве случаев происходит менее чем за 1мс по сигналу функциональной токовой защиты. Выявление нештатной ситуации происходит либо при начальном превышении 10-ти или 15-ти процентного порога с последующим превышением 20-ти процентного порога отклонения (рис.12), либо при превышении 20-ти процентного порога отклонения на первом такте алгоритма обнаружения.

- Процесс при пробое нулевого вентиля в момент подачи импульса управления нг1в режиме генерации
Верхняя диаграмма:
Синяя – напряжение на положительной половине КБ (50В/кл.);
зеленая – напряжение на отрицательной половине КБ (50В/кл.);
штриховая – граница предельного напряжения КБ(238В).
Нижняя диаграмма:
Красная – ток в реакторе фазы А (5А/кл.);
Синяя – ток в реакторе фазы B (5А/кл.);
Зеленая – ток в реакторе фазы C (5А/кл.);
штриховые – границы предельного фазного тока(±11,1А).
Работа защиты ПСН проверялась при снижении одного из питающих напряжений в результате обрыва напряжения 220В на первичной стороне входного развязывающего трансформатора. При снижении напряжения питания ниже допустимого уровня происходит выдача логического сигнала ошибки непосредственно на отключение импульсов управления и силового автомата. От момента отключения импульсов управления из-за инерционности механизма отключения СА до его отключения проходит некоторое время (15мс). Однако процесс защитного отключения происходит раньше, чем СУ переходит в режим непредсказуемого функционирования из-за дальнейшего снижения напряжения питания.
По результатам проведенных экспериментов можно сделать следующие выводы:
- Функциональная защита по отклонению тока позволяет надежно выявить большинство нештатных ситуаций, возникающих при сбое в работе оборудования СТАТКОМ и режиме КЗ двухполюсной шины менее чем за 10мс и способна нести на себе функции основной (не дублирующей) программной защиты.
- Результаты физического моделирования компенсатора в целом подтверждают корректность принятых в математических моделях допущений и правильность. При этом расхождение между результатами моделирования и эксперимента в точности развития аварийного режима составило не более 5%.
- Подтверждена правильность основных принципов построения комплекса программных защит. Показана высокая эффективность разработанных алгоритмов защиты.
В заключении сформулированы основные результаты и выводы по диссертационной работе:
- Предложенная методика проектирования программного комплекса защитных мер компенсатора реактивной мощности позволяет определить электрические и динамические требования к защитному комплексу, очертить необходимый круг задач, стоящих перед программной частью комплекса защитных мер, выявить наиболее опасные с точки зрения повреждения оборудования режимы.
- Показано, что предложенный принцип построения алгоритмов функционирования цифровой системы контроля работы компенсатора в различных режимах, а также системы защит от нештатных ситуаций, позволяют повысить надежность работы оборудования компенсатора в целом;
- Разработанная методика проектирования макета компенсатора реактивной мощности с учетом масштабных коэффициентов позволяет не только осуществить выбор основных силовых элементов схемы, но и провести исследования аварийных процессов, результаты которых незаменимы при проектировании защитного комплекса оборудования СТАТКОМа (50МВАр).
- Математическая модель компенсатора реактивной мощности, разработанная в программном комплексе OrCAD, позволяет проводить анализ аварийных процессов вызванных функциональными сбоями в работе оборудования СТАТКОМа и настройку регуляторов системы управления.
- Показано, что предложенная функциональная защита по отклонению тока позволяет надежно выявить большинство нештатных ситуаций, возникающих при сбое в работе оборудования СТАТКОМ и режиме КЗ двухполюсной шины и способна нести на себе функции основной (не дублирующей) программной защиты.
Основные положения диссертационной работы изложены в печатных трудах:
1. Розанов Ю.К., Кошелев К.С., Смирнов М.И. Цифровая система управления статическим компенсатором реактивной мощности // Электричество. - 2006 г. - вып.7. - С. 25-30.
2. Кошелев К.С., Пешков М.В. Выбор параметров статического компенсатора реактивной мощности типа СТАТКОМ // Электротехника. - 2008 г. - вып.7. - С. 34-38.